220 câu trắc nghiệm Lý thuyết điều khiển tự động
Với hơn 220 câu trắc nghiệm Lý thuyết điều khiển tự động được chia sẻ dành cho các bạn sinh viên chuyên ngành tham khảo ôn tập chuẩn bị cho kì thi sắp tới. Bộ câu hỏi xoay quanh những kiến thức về các phương pháp nghiên cứu hệ thống tự động, bao gồm các phương pháp thiết lập mô hình toán của hệ thống, phân tích – đánh giá chất lượng hệ thống cũng như thiết kế bộ điều khiển...Để việc ôn tập trở nên hiệu quả hơn, các bạn có thể ôn theo từng phần trong bộ câu hỏi này bằng cách trả lời lần lượt các câu hỏi cũng như so sánh đáp và lời giải chi tiết được đưa ra. Sau đó các bạn hãy chọn tạo ra đề ngẫu nhiên để kiểm tra lại kiến thức mình đã ôn tập được nhé!
Chọn hình thức trắc nghiệm (25 câu/30 phút)
-
Câu 1:
Biến đổi Laplace của hàm f(t)= t là?
A. 1/p
B. 1/(p+a)
C. 1/p2
D. 1/(p-a)
-
Câu 2:
Biến đổi Laplace của hàm mũ \(f(t) = {e^{ - at}}\)
A. \(\frac{1}{{s + a}}\)
B. \(\frac{1}{{s - a}}\)
C. \(\frac{a}{{s + a}}\)
D. \(\frac{a}{{{s^2} + a}}\)
-
Câu 3:
Cho hệ thống có phương trình đặc trưng: 2s4 +s3 + 3s2 + 2s + 2 = 0 . Bảng Routh của hệ thống được cho như sau:
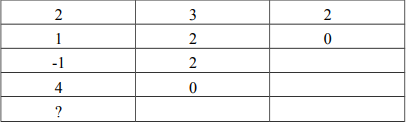
Phần tử “?” có giá trị bằng:
A. 2
B. 3
C. 4
D. 5
-
Câu 4:
Tín hiệu ra của bộ chuyển đổi A/D:
A. Tín hiệu liên tục
B. Tín hiệu số
C. Sóng sin
D. Xung vuông
-
Câu 5:
Cho hệ có phương trình đặc trưng \({s^4} + 2{s^3} + 3{s^2} + 4s + 5 = 0\) . Xét tính ổn định của hệ thống, và cho biết có bao nhiêu nghiệm bên trái, bao nhiêu nghiệm bên phải mặt phẳng phức:
A. Hệ thống ổn định, có 4 nghiệm nằm bên trái mặt phẳng phức
B. Hệ thống không ổn định, có 3 nghiệm bên phải mặt phẳng phức, 1 nghiệm bên trái mặt phẳng phức
C. Hệ thống không ổn định, có 2 nghiệm bên phải mặt phẳng phức, 2 nghiệm bên trái mặt phẳng phức
D. Hệ thống không ổn định, có 1 nghiệm bên phải mặt phẳng phức, 3 nghiệm bên trái mặt phẳng phức
-
Câu 6:
Biểu đồ Bode là hình vẽ gồm các thành phần:
A. Biểu đồ Bode về biên độ
B. Biểu đồ Bode về pha
C. Biểu đồ Bode về biên độ và biểu đồ Bode về pha
D. Vòng tròn đơn vị và trục ảo
-
Câu 7:
Phát biểu nào sau đây là đúng về Quá trình điều khiển:
A. Quá trình điều khiển tự động là quá trình điều khiển không có sự can thiệp của con người
B. Quá trình điều khiển là quá trình thu thập dữ liệu
C. Quá trình điều khiển là quá trình xử lý tín hiệu
D. Quá trình điều khiển tự động là quá trình mà con người đóng vai trò chủ đạo
-
Câu 8:
Dùng tiêu chuẩn Routh để xét ổn định của hệ thống có phương trình đặc trưng là: s4+4s3+5s2+2s+1=0
A. Không ổn định
B. Ổn định
C. Ranh giới ổn định
D. Chưa xác định
-
Câu 9:
Cho hệ có phương trình đặc trưng. Xét tính ổn định của hệ thống, và cho biết có bao nhiêu nghiệm có phần thực dương:
A. Hệ thống không ổn định, có 2 nghiệm có phần thực dương
B. Hệ thống không ổn định, có 3 nghiệm có phần thực dương
C. Hệ thống không ổn định, có 1 nghiệm có phần thực dương
D. Hệ thống ổn định, có 4 nghiệm nằm bên trái mặt phẳng phức
-
Câu 10:
Cho hệ thống hồi tiếp âm đơn vị sau. Sai số xác lập exl là:
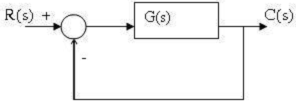
A. \({e_{xl}} = \mathop {\lim }\limits_{t \to \infty } e(t) = \mathop {\lim }\limits_{s \to 0} \frac{{sR(s)}}{{1 + G(s)}}\)
B. \({e_{xl}} = \mathop {\lim }\limits_{t \to 0} e(t) = \mathop {\lim }\limits_{s \to \infty } \frac{{sR(s)}}{{1 + G(s)}}\)
C. \({e_{xl}} = \mathop {\lim }\limits_{t \to \infty } e(t) = \mathop {\lim }\limits_{s \to 0} \frac{{R(s)}}{{1 + G(s)}}\)
D. \({e_{xl}} = \mathop {\lim }\limits_{t \to \infty } e(t) = \mathop {\lim }\limits_{s \to 0} \frac{{sG(s)}}{{1 + R(s)}}\)
-
Câu 11:
Cho hàm truyền \(G(s) = \frac{5}{{{s^3} + 8{s^2} + 9s + 2}}\) hãy lập phương trình trạng thái:
A. \(A = \left[ {\begin{array}{*{20}{c}} 0&1&0\\ 0&0&1\\ { - 2}&{ - 9}&{ - 8} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 0\\ 0\\ 5 \end{array} \right]{\rm{ ; C = }}\left[ {1{\rm{ 0 0}}} \right];\)
B. \(A = \left[ {\begin{array}{*{20}{c}} 0&1&0\\ 0&0&1\\ 2&9&8 \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 0\\ 0\\ 5 \end{array} \right]{\rm{ ; C = }}\left[ {1{\rm{ 0 0}}} \right];\)
C. \(A = \left[ {\begin{array}{*{20}{c}} 0&1&0\\ 0&0&1\\ { - 2}&{ - 9}&{ - 8} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 0\\ 0\\ 2 \end{array} \right]{\rm{ ; C = }}\left[ {1{\rm{ 1 0}}} \right];\)
D. \(A = \left[ {\begin{array}{*{20}{c}} 1&1&0\\ 0&0&1\\ { - 2}&{ - 9}&{ - 8} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 0\\ 1\\ 2 \end{array} \right]{\rm{ ; C = }}\left[ {1{\rm{ 0 0}}} \right];\)
-
Câu 12:
Các cách đánh giá thường được dùng đề xét ổn định cho hệ liên tục là:
A. Tiêu chuẩn ổn định Routh- Hurwitz; Nyquist-Bode
B. Tiêu chuẩn ổn định Routh- Hurwitz; Nyquist-Bode và phương pháp quỹ đạo nghiệm số
C. Tiêu chuẩn ổn định Routh- Hurwitz; Mikhailov-Nyquist-Bode và phương pháp chia miền ổn định
D. Tiêu chuẩn ổn định tần số, tiêu chuẩn ổn định đại số và phương pháp quỹ đạo nghiệm số
-
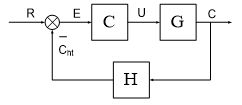
Câu 13:
Hàm truyền \(G(s) = \frac{{C(s)}}{{R(s)}}\) của hệ thống ở hình trên là:
A. \(\frac{{{G_1}{G_3} + {G_2}G{}_3}}{{1 + {G_1}{G_3} + {G_2}G{}_3}}\)
B. \(\frac{{{G_1}{G_3} + {G_2}G{}_3}}{{1 + {G_1}{G_3} - {G_2}G{}_3}}\)
C. \(\frac{{{G_1}{G_3} - {G_2}G{}_3}}{{1 + {G_1}{G_3} + {G_2}G{}_3}}\)
D. \(\frac{{{G_1} + {G_2}}}{{1 - {G_1}{G_3} - {G_2}G{}_3}}\)
-
Câu 14:
Hệ thống có biểu đồ Bode biên và Bode pha của hệ hở như hình vẽ sau đây thì hệ kín:
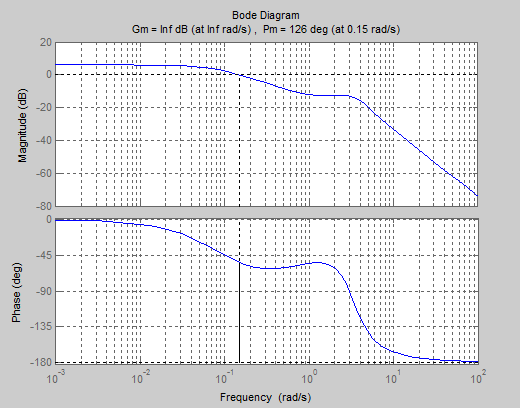
A. Ổn định
B. Không ổn định
C. Ở biên giới ổn định
D. Chưa xác định
-
Câu 15:
Đặc điểm của khâu hiệu chỉnh PD (Proportional Derivative) là:
A. Làm chậm đáp ứng của hệ thống, tăng thời gian quá độ
B. Làm chậm đáp ứng của hệ thống, giảm thời gian quá độ
C. Làm nhanh đáp ứng của hệ thống, giảm thời gian quá độ
D. Làm nhanh đáp ứng của hệ thống, tăng thời gian quá độ
-
Câu 16:
Biến đổi Laplace của hàm f(t)= eat là?
A. 1/p
B. 1/(p+a)
C. 1/(p+a)2
D. 1/(p-a)
-
Câu 17:
Phương trình vi phân biểu diễn khâu nguyên hàm với K là hệ số truyền của phần tử?
A. y=K/x
B. y=x/K
C. y=Kx
D. y=1/Kx
-
Câu 18:
Bộ bù trễ pha được sử dụng khi:
A. Muốn giảm sai số xác lập của hệ thống
B. Muốn tăng sai số xác lập của hệ thống
C. Muốn tăng thời gian đáp ứng quá độ của hệ thống
D. Tín hiệu vào của hệ thống là hàm nấc đơn vị
-
Câu 19:
Xác định hàm truyền tương đương của hệ thống nối tiếp như hình vẽ:
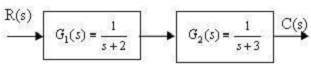
A. \({G_{td}}(s) = \frac{1}{{{s^2} + 5s + 2}}\)
B. \({G_{td}}(s) = \frac{{s + 2}}{{{s^2} + 5s + 6}}\)
C. \({G_{td}}(s) = \frac{1}{{{s^2} + 3s + 6}}\)
D. \({G_{td}}(s) = \frac{1}{{{s^2} + 5s + 6}}\)
-
Câu 20:
Hệ thống phi tuyến là hệ thống:
A. Có một ngõ vào một ngõ ra
B. Có tín hiệu ra là phi tuyến theo thời gian
C. Được mô tả bởi phương trình vi phân phi tuyến
D. Nhiều ngõ vào và một ngõ ra
-
Câu 21:
Theo tiêu chuẩn Nyquist nếu hệ hở ổn định hay ở biên giới ổn định là đặc tính tần số biên pha của hệ hở có quan hệ như thế nào với điểm (-1, j0)?
A. Không bao quanh
B. Bao quanh
C. Đi qua
D. Không có quan hệ gì
-
Câu 22:
Tìm nghiệm của hệ thống có phương trình đặc tính sau: \({s^2} + 6s + 5 = 0\)
A. \({s_1} = - 1;{\rm{ }}{{\rm{s}}_2} = - 5\)
B. \({s_1} = - 1 + j;{\rm{ }}{{\rm{s}}_2} = - 5 + j3\)
C. \({s_1} = - 1 + j3;{\rm{ }}{{\rm{s}}_2} = - 5 + 2j5\)
D. \({s_1} = - 3;{\rm{ }}{{\rm{s}}_2} = - 2\)
-
Câu 23:
Xét tính ổn định của hệ thống có phương trình đặc trưng: \({s^4} + 2{s^3} + 4{s^2} + 8s + 3 = 0\)
A. Hệ thống ở biên giới ổn định
B. Hệ thống không ổn định
C. Hệ thống ổn định
D. Hệ thống có 3 nghiệm
-
Câu 24:
Cho hệ thống có cấu trúc sau:
Tìm hàm truyền tương đương của hệ thống:\(H(s) = 1\)\(G(s) = \frac{{s + 3}}{{{s^2} + 3s + 1}}\)\(C(s) = \frac{3}{{5s + 1}}\)
A. \({G_{td}}(s) = \frac{{3s + 10}}{{5{s^3} + 16{s^2} + 11s + 10}}\)
B. \({G_{td}}(s) = \frac{{3s + 9}}{{5{s^3} + 16{s^2} + 11s + 11}}\)
C. \({G_{td}}(s) = \frac{{3s + 9}}{{5{s^3} + 16{s^2} + 11s + 10}}\)
D. \({G_{td}}(s) = \frac{{s + 9}}{{5{s^3} + 16{s^2} + 11s + 10}}\)
-
Câu 25:
Quan hệ giữa tín hiệu vào và tín hiệu ra của hệ thống điều khiển rời rạc được mô tả bằng:
A. Phương trình vi phân
B. Phương trình sai phân
C. Phương trình đại số
D. Graph tín hiệu
Đề thi liên quan

860 Câu trắc nghiệm môn Hóa phân tích
tracnghiem.net sưu tầm và chia sẻ hơn 860 Câu trắc nghiệm môn Hóa phân tích có đáp án dành cho các bạn sinh viên, sẽ giúp bạn hệ thống kiến thức chuẩn bị cho kì thi sắp diễn ra.
160 câu trắc nghiệm Kỹ thuật mạch điện tử
Bộ 160 câu hỏi trắc nghiệm Kỹ thuật mạch điện tử có đáp án được tracnghiem.net chọn lọc và chia sẻ dưới đây, nhằm giúp các bạn sinh viên có thêm tư liệu tham khảo!

340+ Câu hỏi trắc nghiệm môn Đấu thầu
Cùng ôn thi với 300+ câu hỏi trắc nghiệm môn Đấu thầu có đáp án dưới đây, nhằm giúp các bạn sinh viên chuyên ngành hệ thống lại kiến thức, chuẩn bị cho kì thi sắp diễn ra. Mời các bạn cùng tham khảo